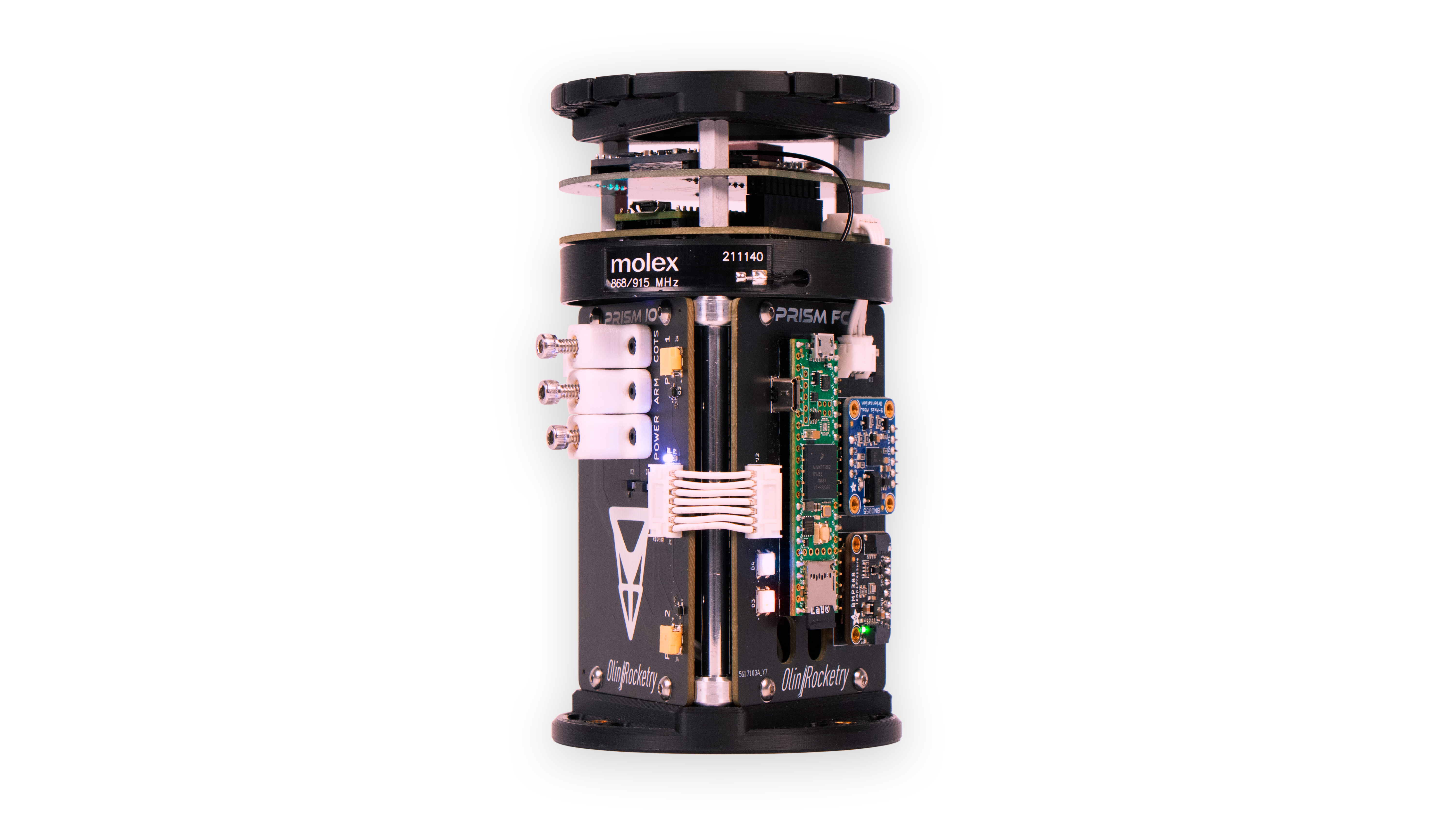
Model Rocket Avionics
A full-featured avionics suit developed for high-power model rockets
Over the years, I have built 4 custom FPV racing drones from off-the-shelf components and modified/upgraded several additional multirotors. The hobby has taught me about PID control tuning, sensor filtering, battery and electrical engineering, Radio-Frequency science, and flight dynamics.

While some drones seek to optimize one or two specific design parameters, this craft was meant to be a "well-rounded" flyer capable of carrying a GoPro for HD video recording. It compromises weight, power, and durability in such a way that aligns with my flying style to give thrilling performance.

While the 5" is my go-to drone for capturing cinematic video, in some cases, it presents too large of a risk to be flown in all places. I built this drone to be extremely light and compact while still having a powerful drivetrain cappable of spinning 3" propellers. This size-to-weight class maintains extreme maneuverability and provides an impressive flying exprience in a wider range of locations.
In order to get high-quality video from my 3" drone, I reverse-engineered a GoPro camera to be ultra-lightweight. While GoPro modifications have been done before in the drone community, I did not find anyone who had documented such drastic modifications to the specific camera model that I had. In the end, I was able to reduce the weight of the camera from 74 grams to 15 grams while maintaining its full functionality.


I also used topology optimization to design a canopy to mount the camera to the drone.
In the last few years, frame resonance analysis has risen to the top of high-performance Drone dynamic research. In this project, I developed an analytical model for studying and predicting drone resonance.
First, I performed a frequency study in SOLIDWORKS in order to visualize some of the common
resonant modes that occur in typical drone frames.
I used the results of the study to derive a 2nd order ODE that encapsulates the significant
motion.
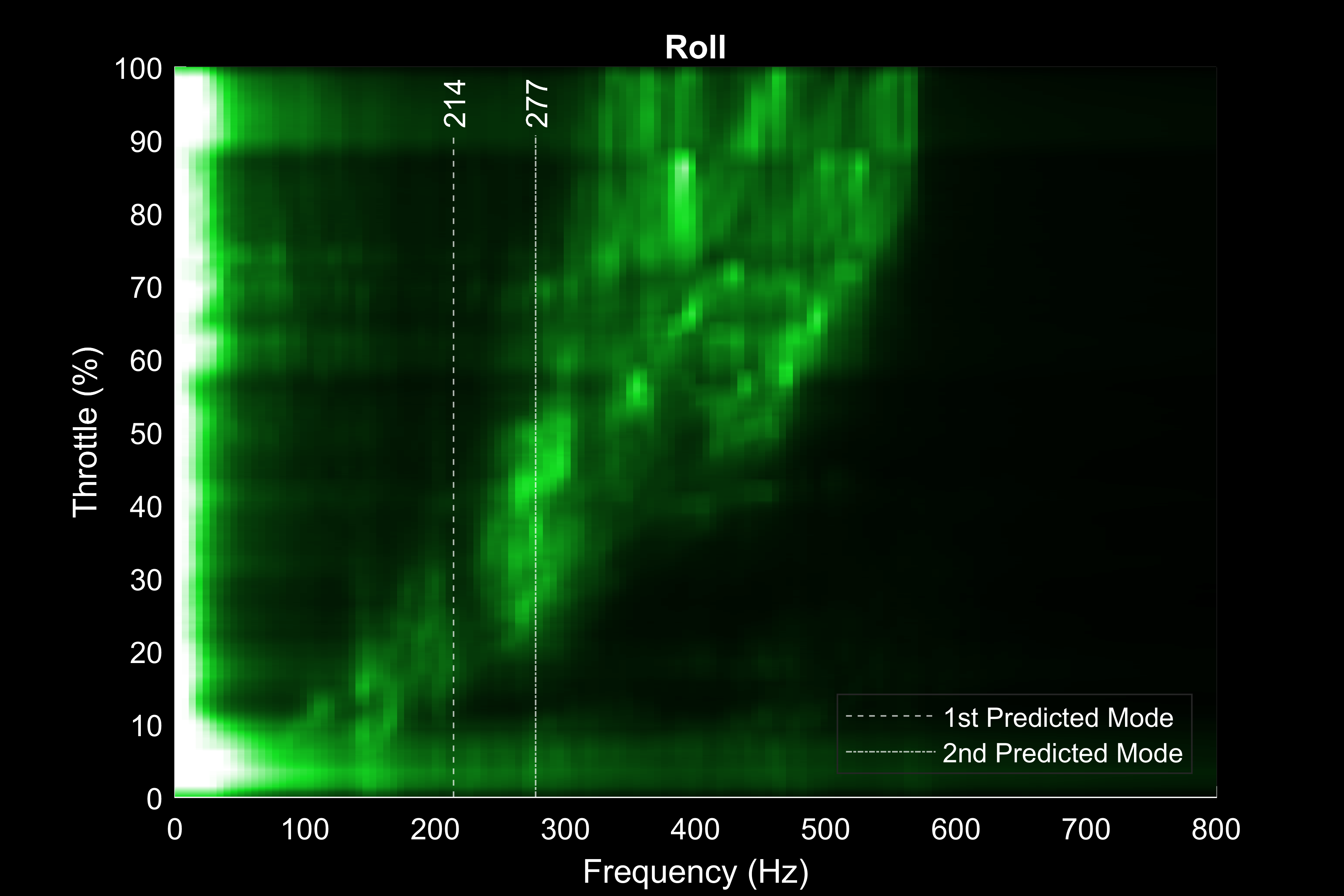
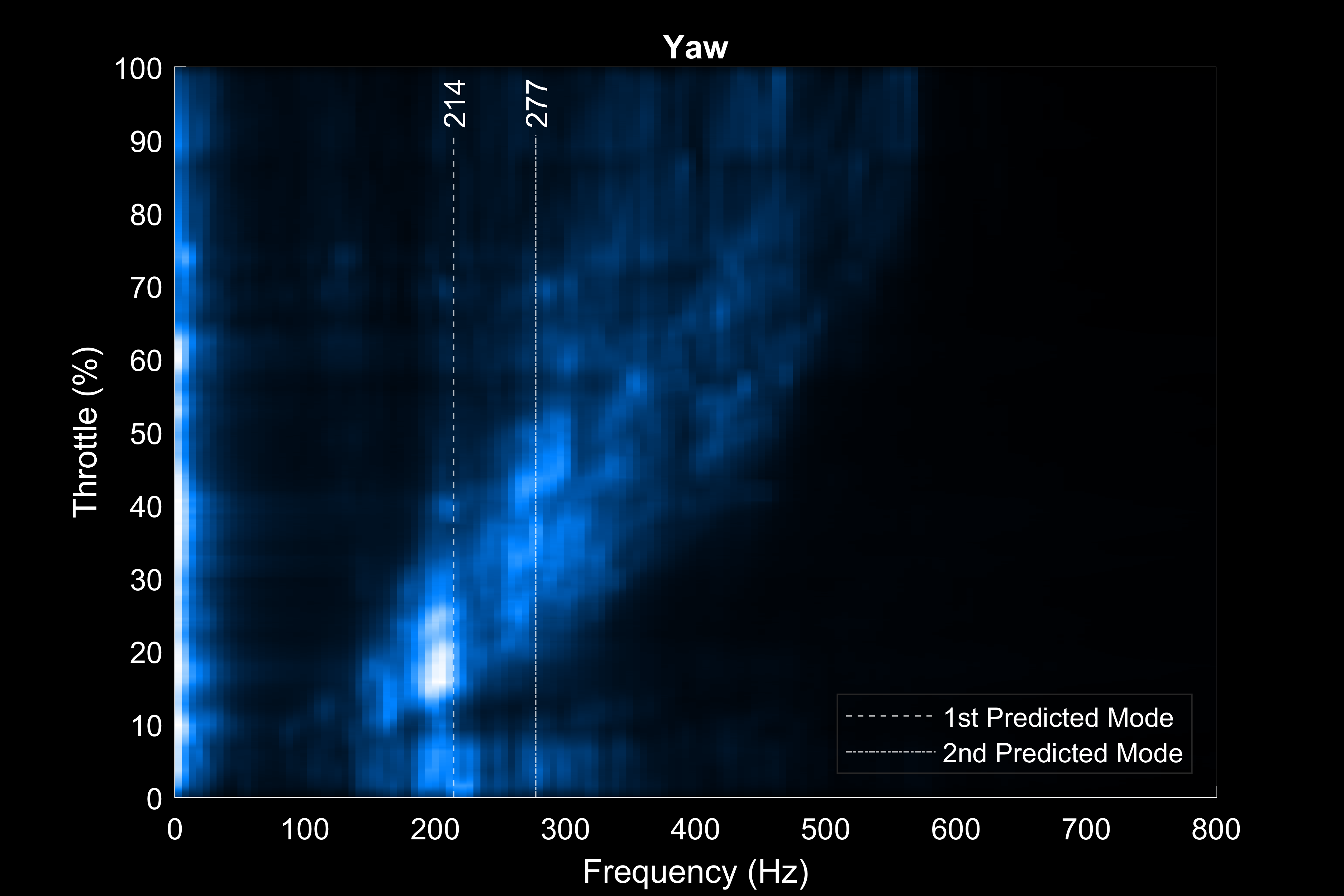
Finally, I performed Fourier analysis on real gyroscope data from a drone to compare the real
resonant frequencies with the eigenfrequencies of the kinematic model.
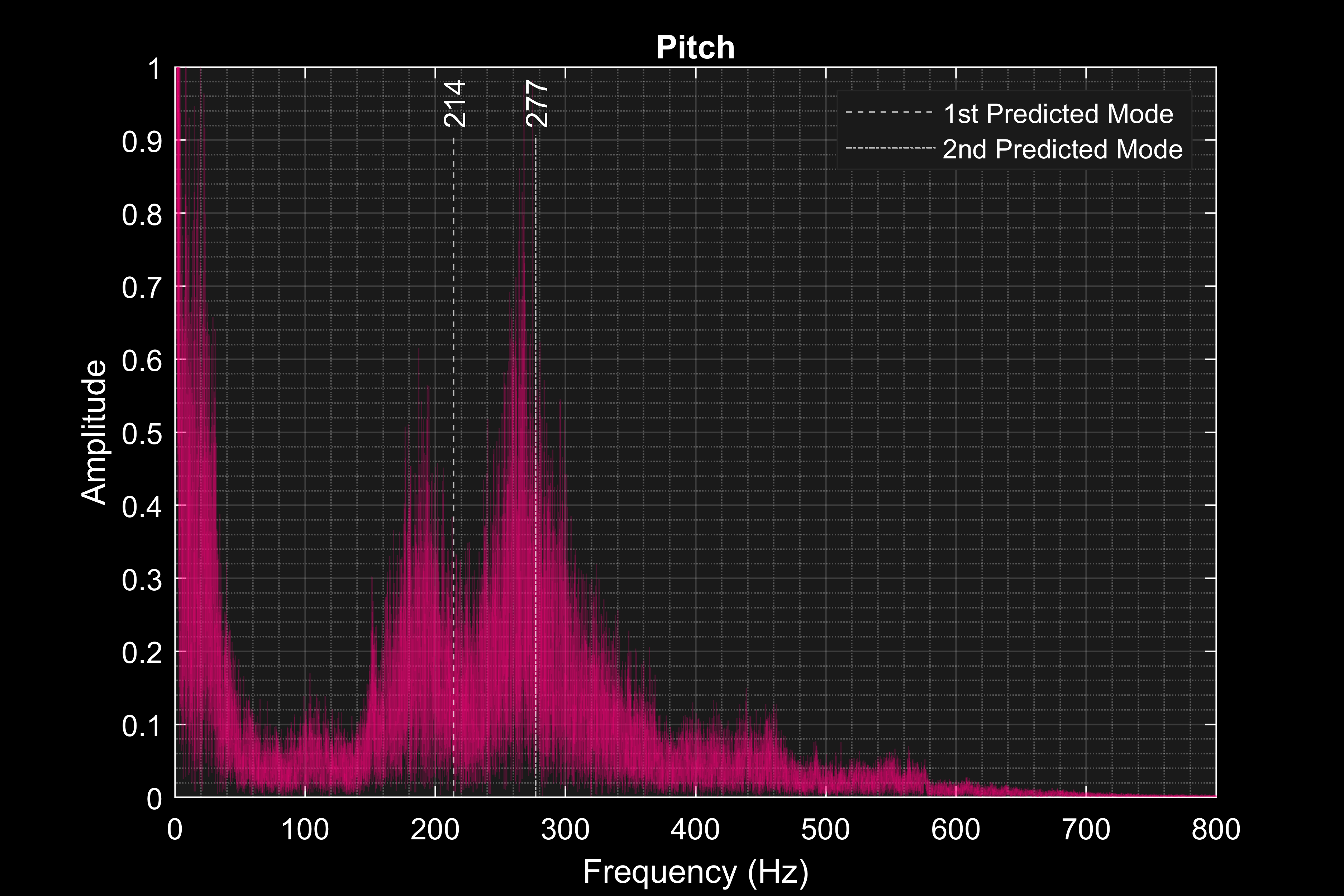
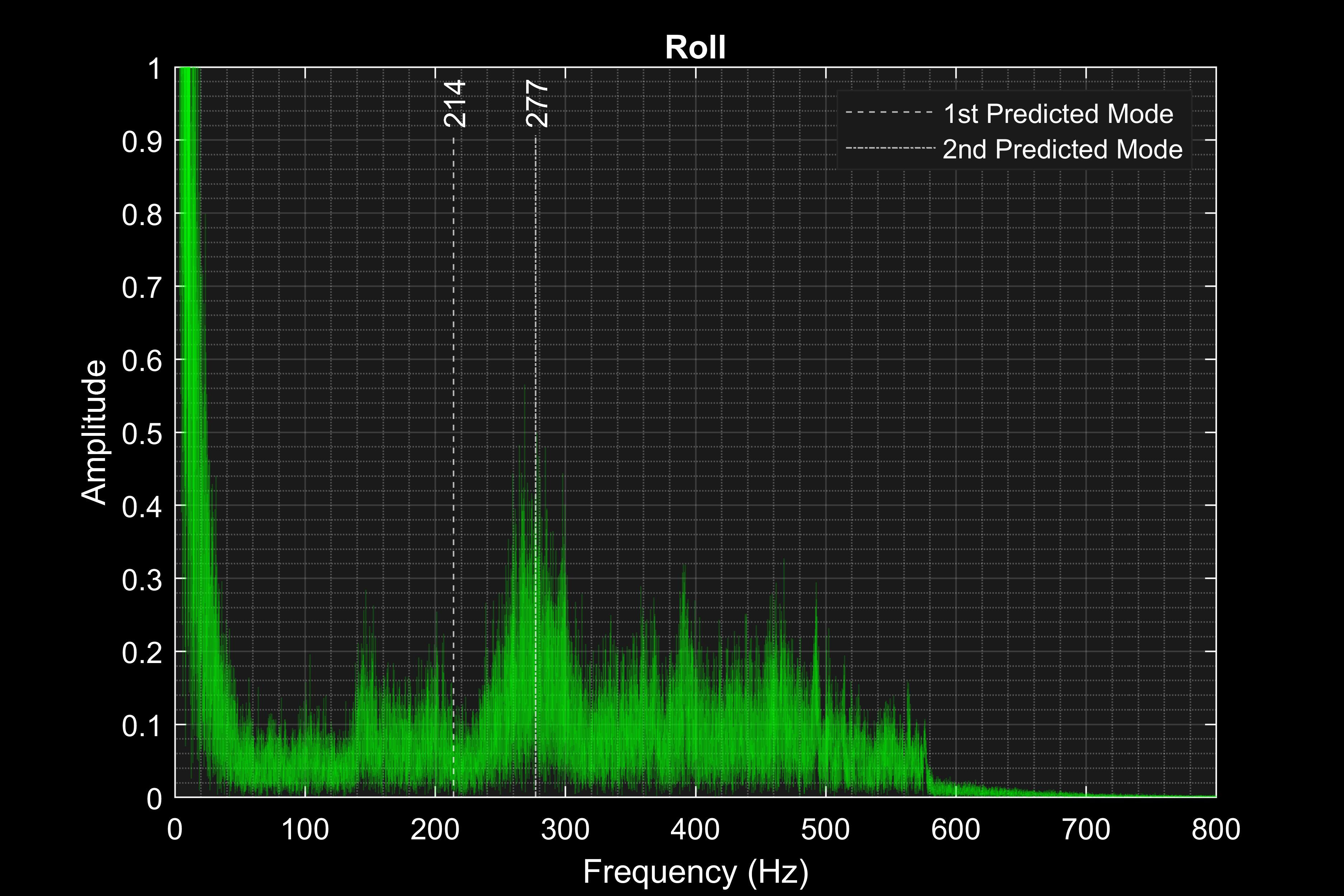
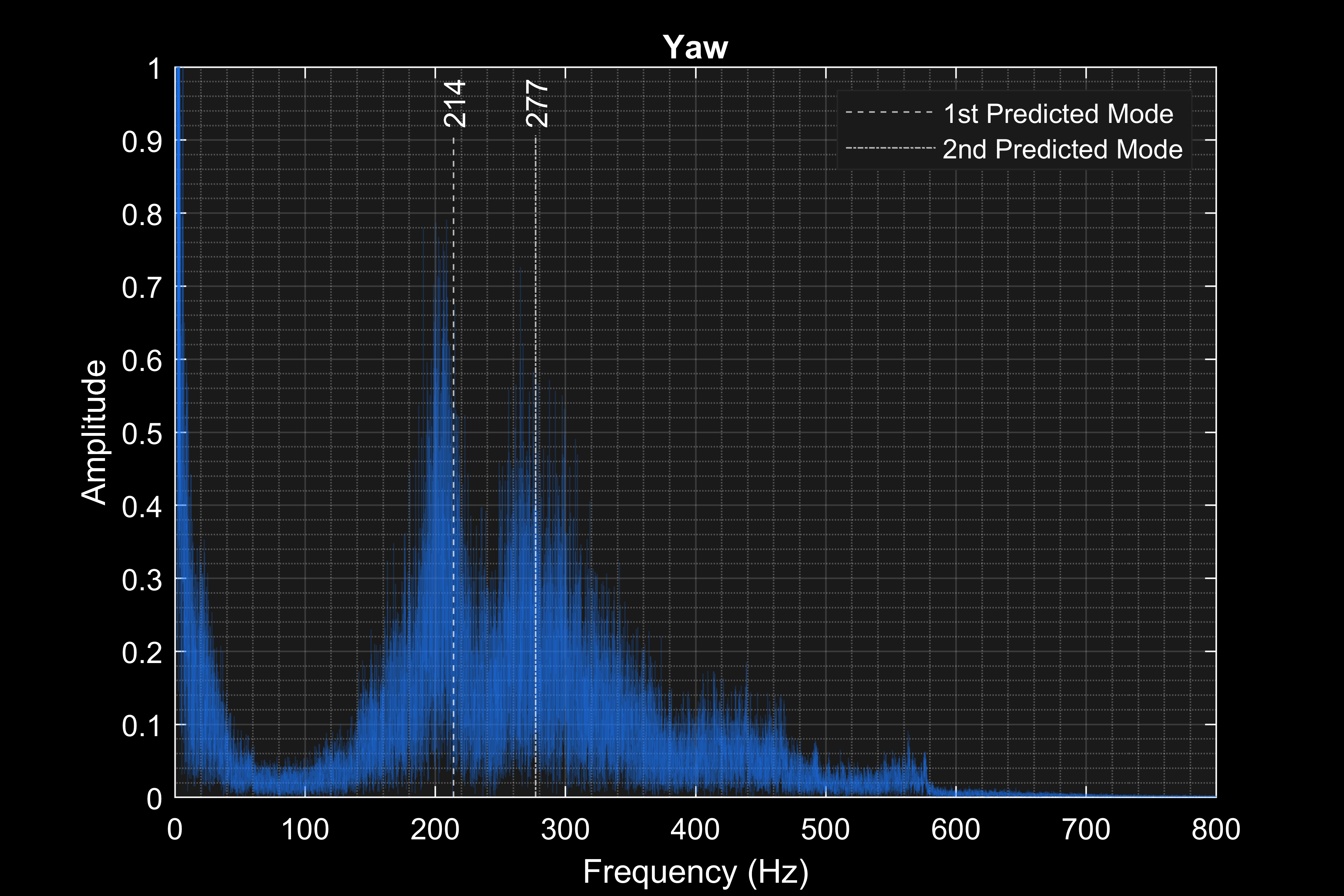
Despite its mathematical simplicity, the model proves to be a good predictor of the resonant
frequencies.
It could be used to guide initial frame design and inform gyro notch-filtering on drones where
black box data is not available.
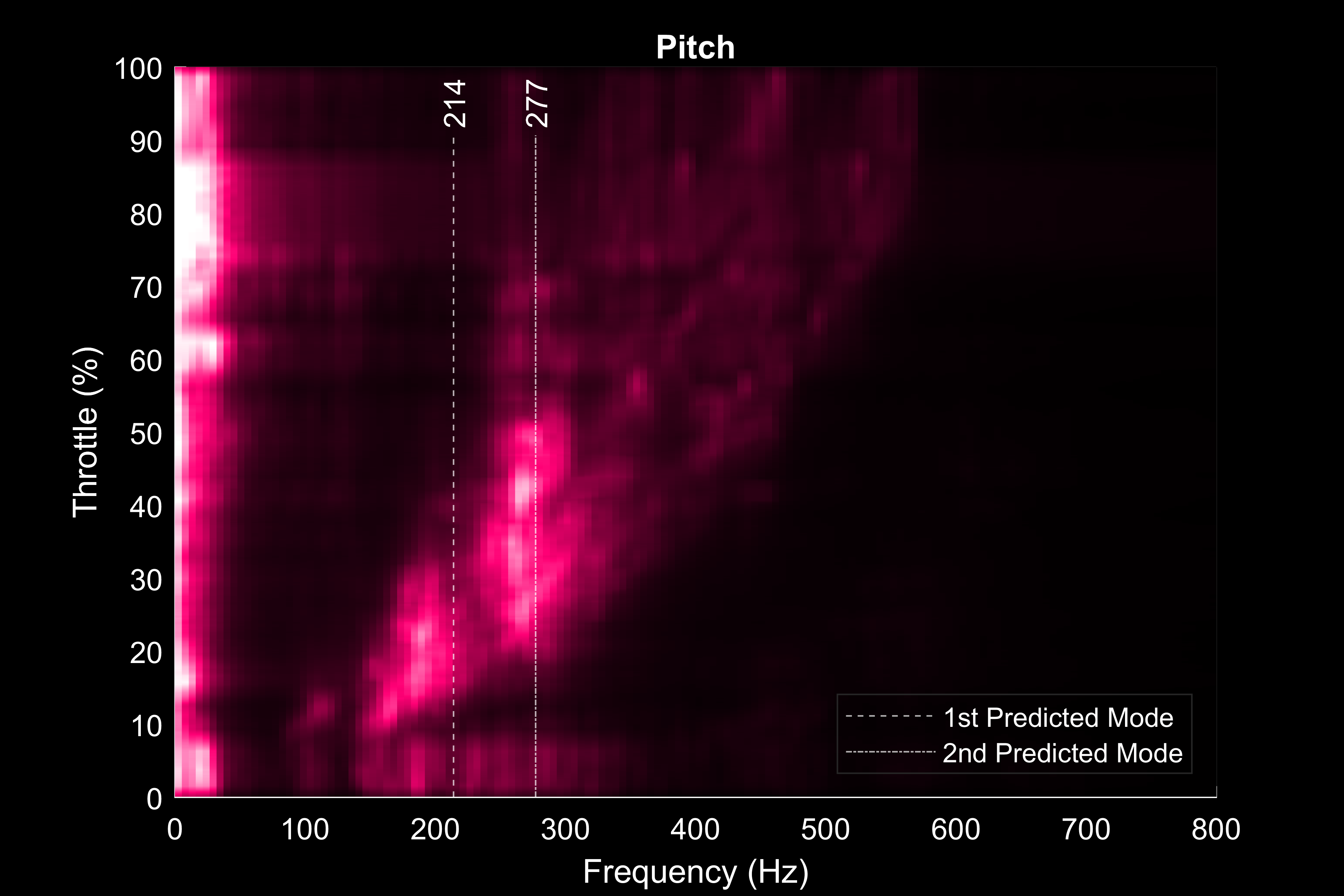
I also used MATLAB to explore the correlation between vibration frequency and throttle position. This plot gives insight into some of the noisy throttle positions which can be used to help tune dynamic notch filters more precisely.
In addition to the technological side of drones, I enjoy producing and publishing my own films including cinematic flight videos and build guide tutorials.
A full-featured avionics suit developed for high-power model rockets
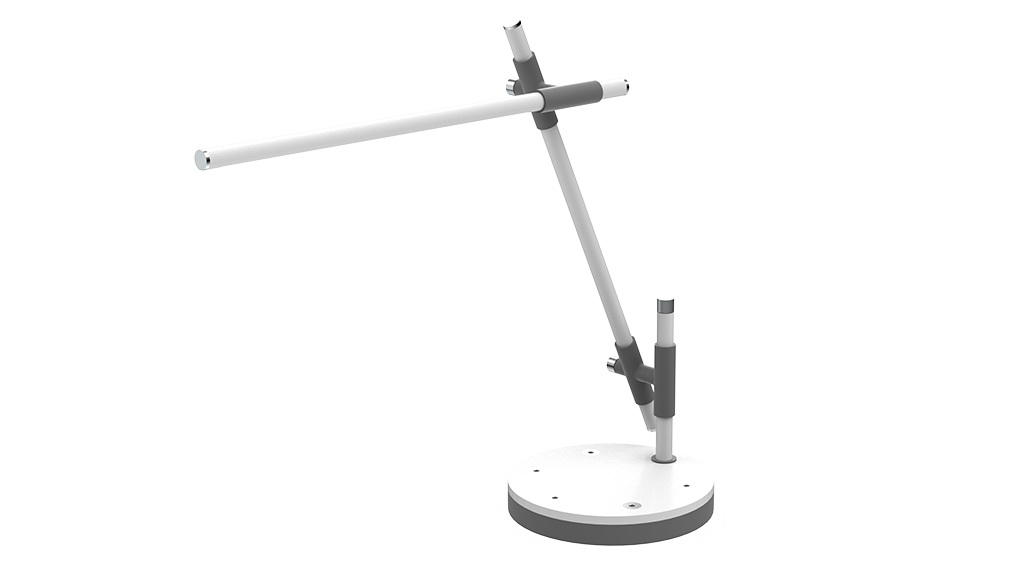
A custom dimable LED desk light

My contibutions on the Olin Electric Motorsport formula SAE team