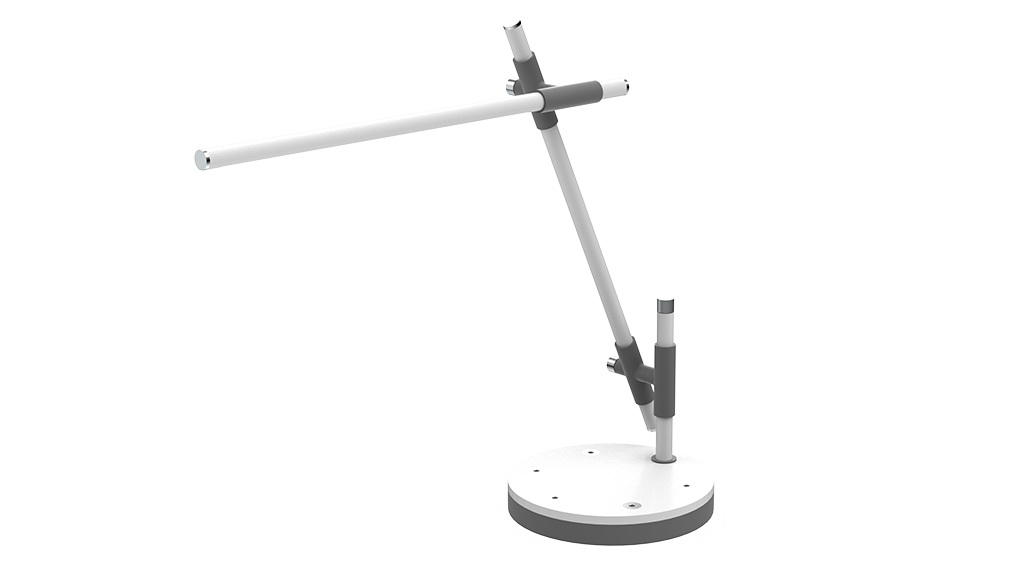
Lamp
A custom dimable LED desk light
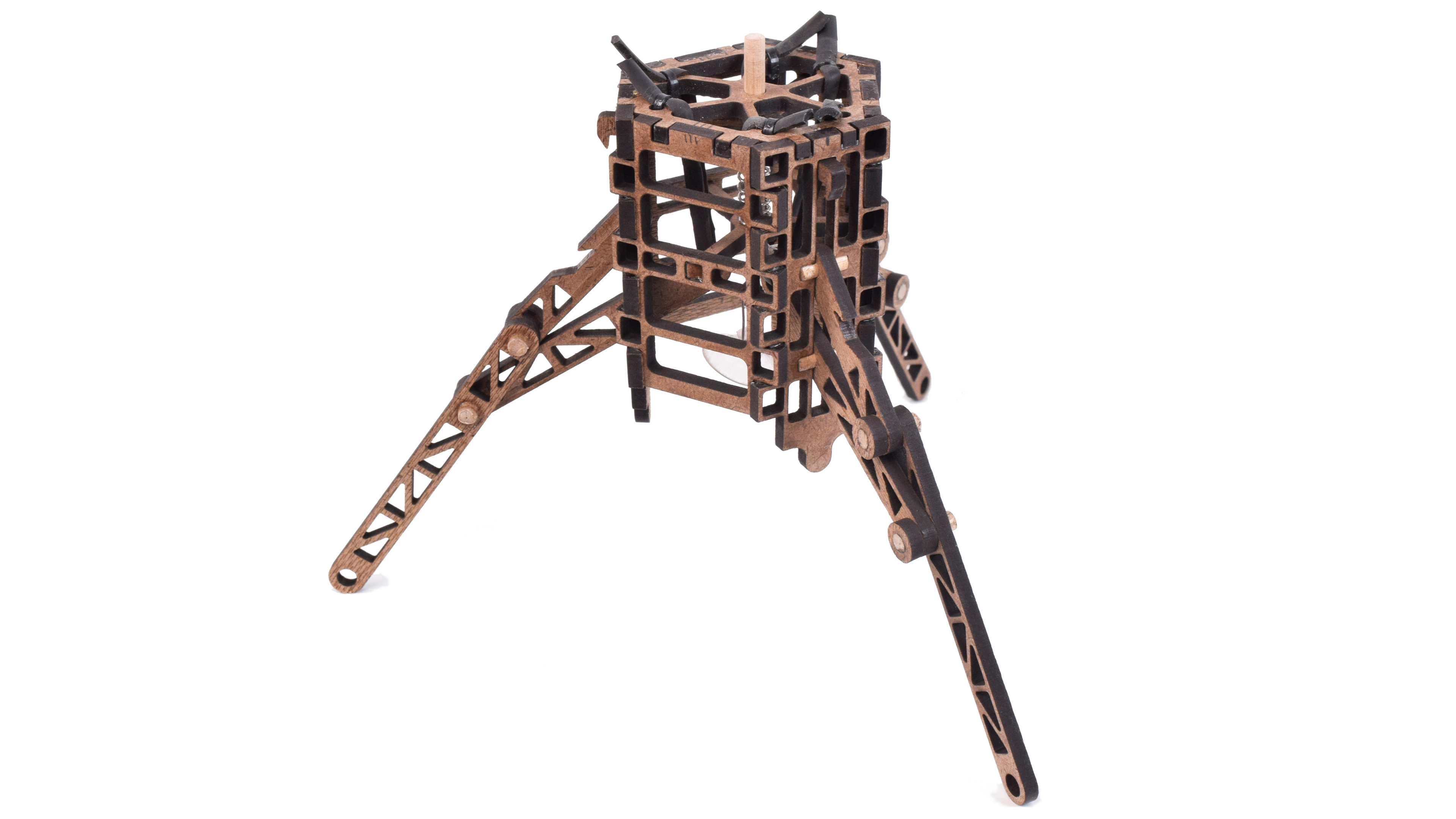
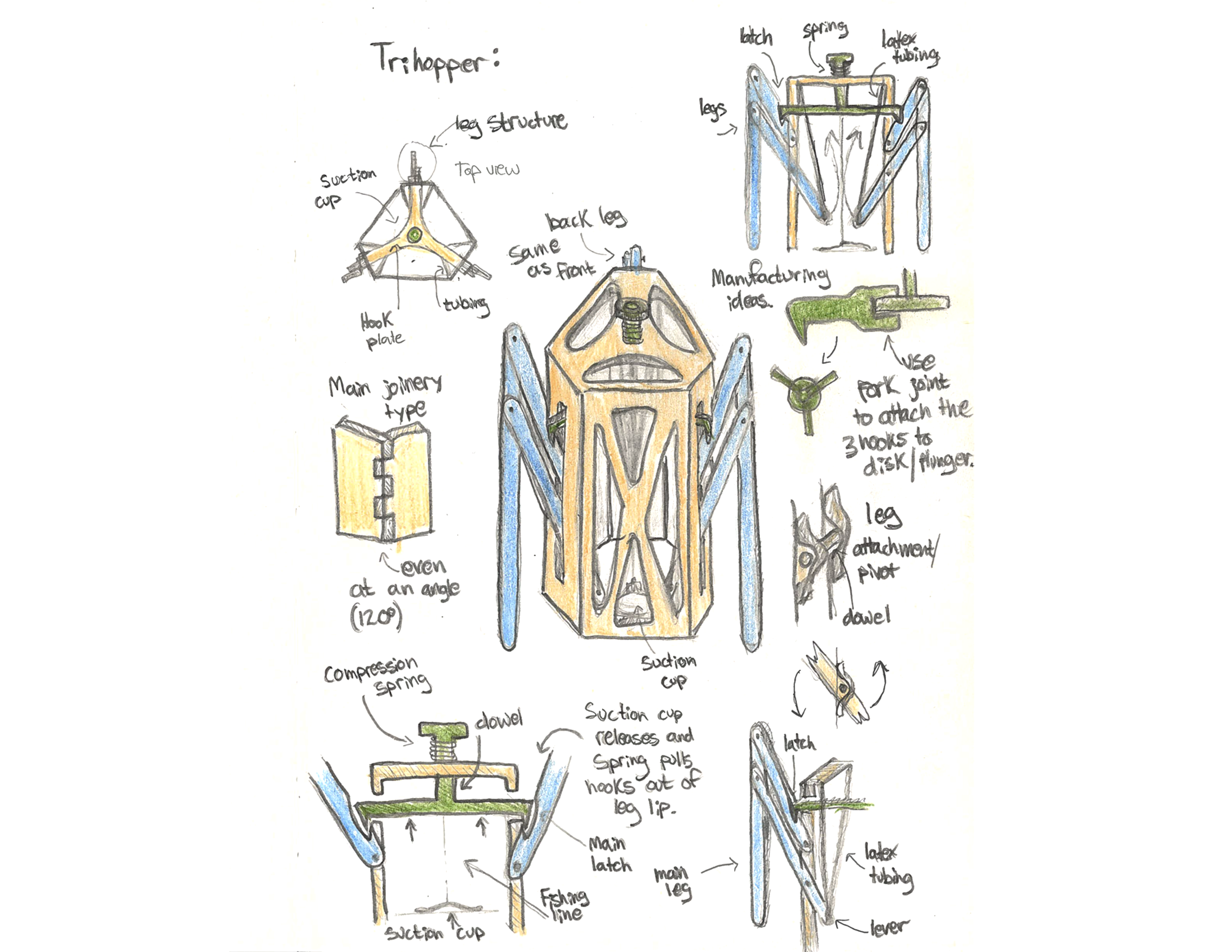
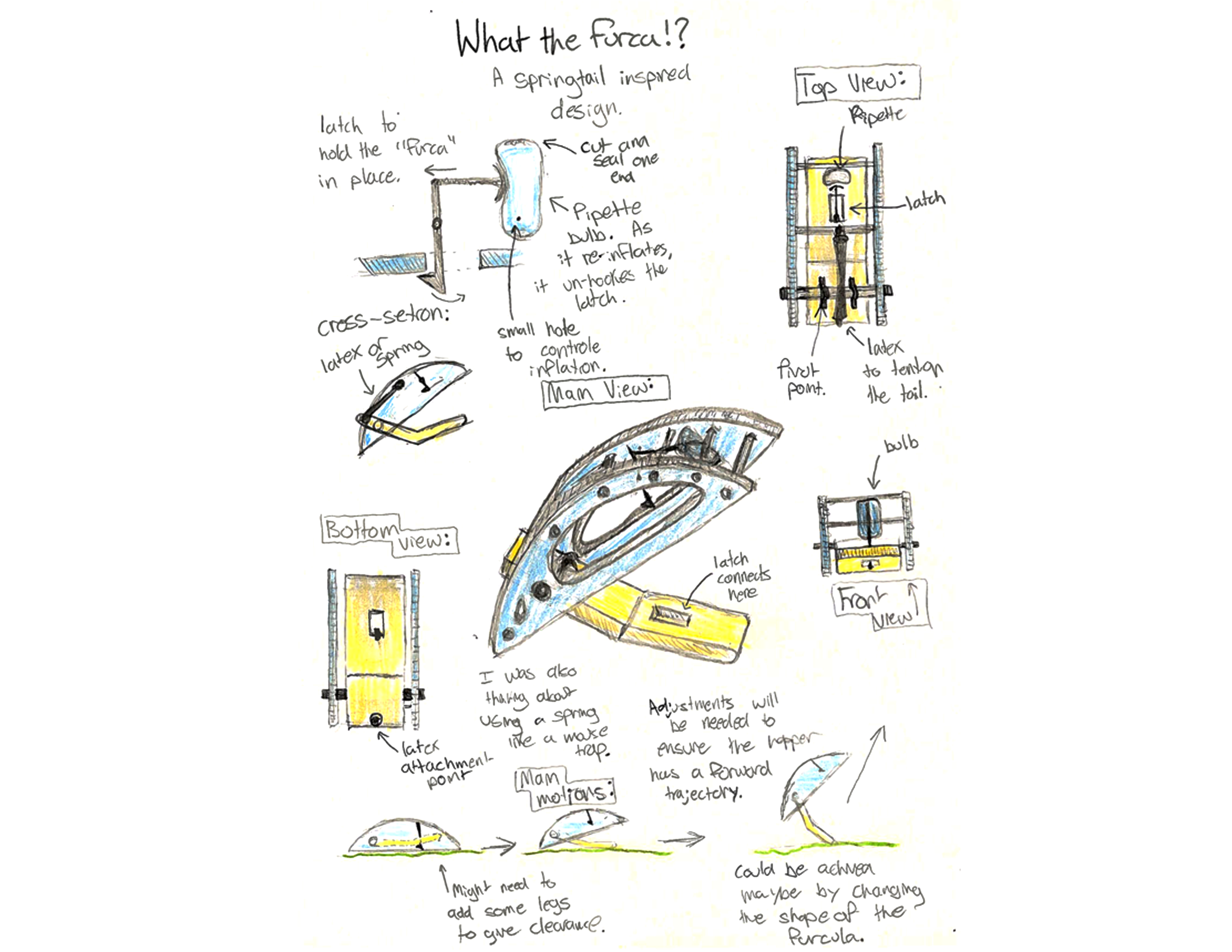
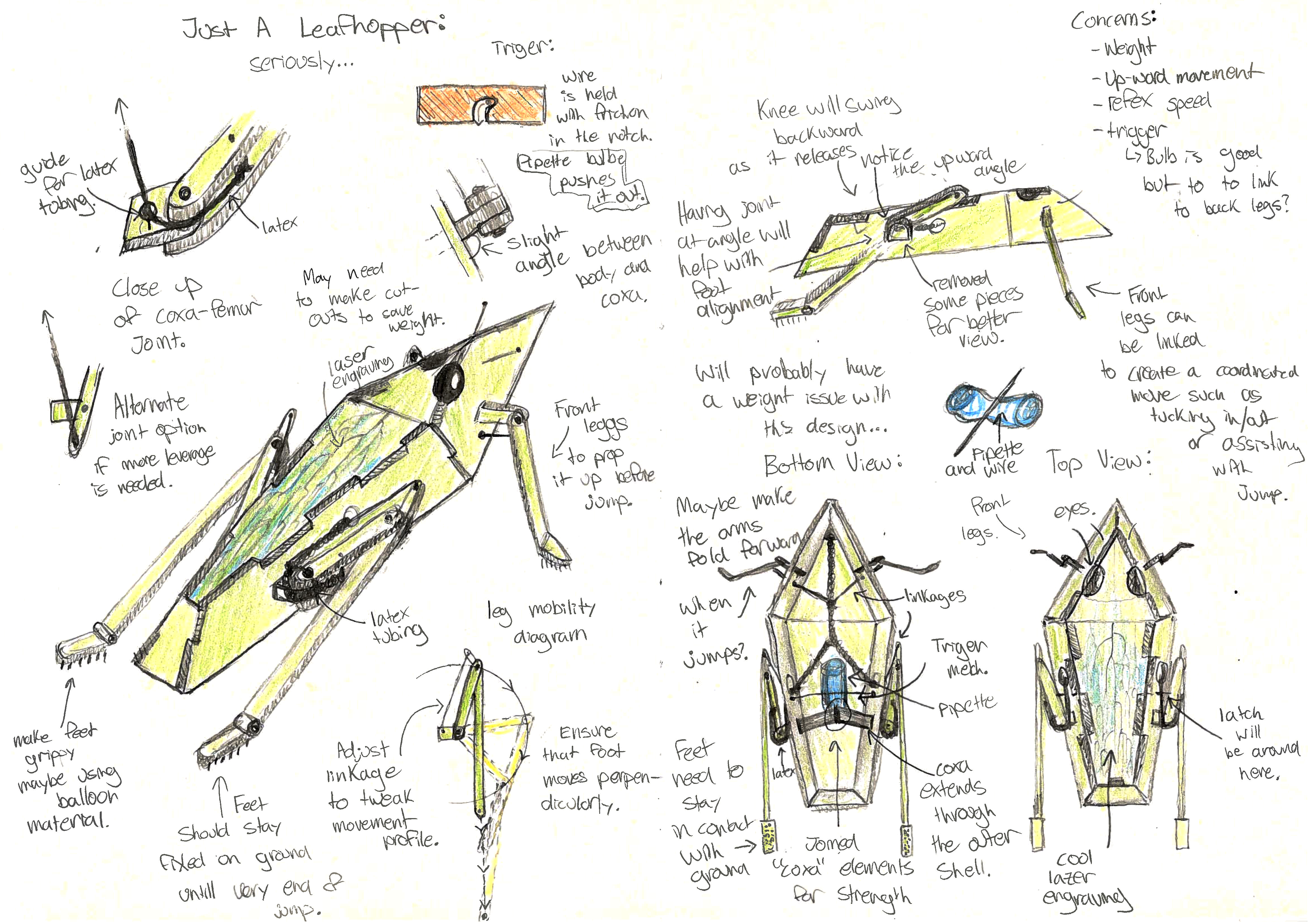
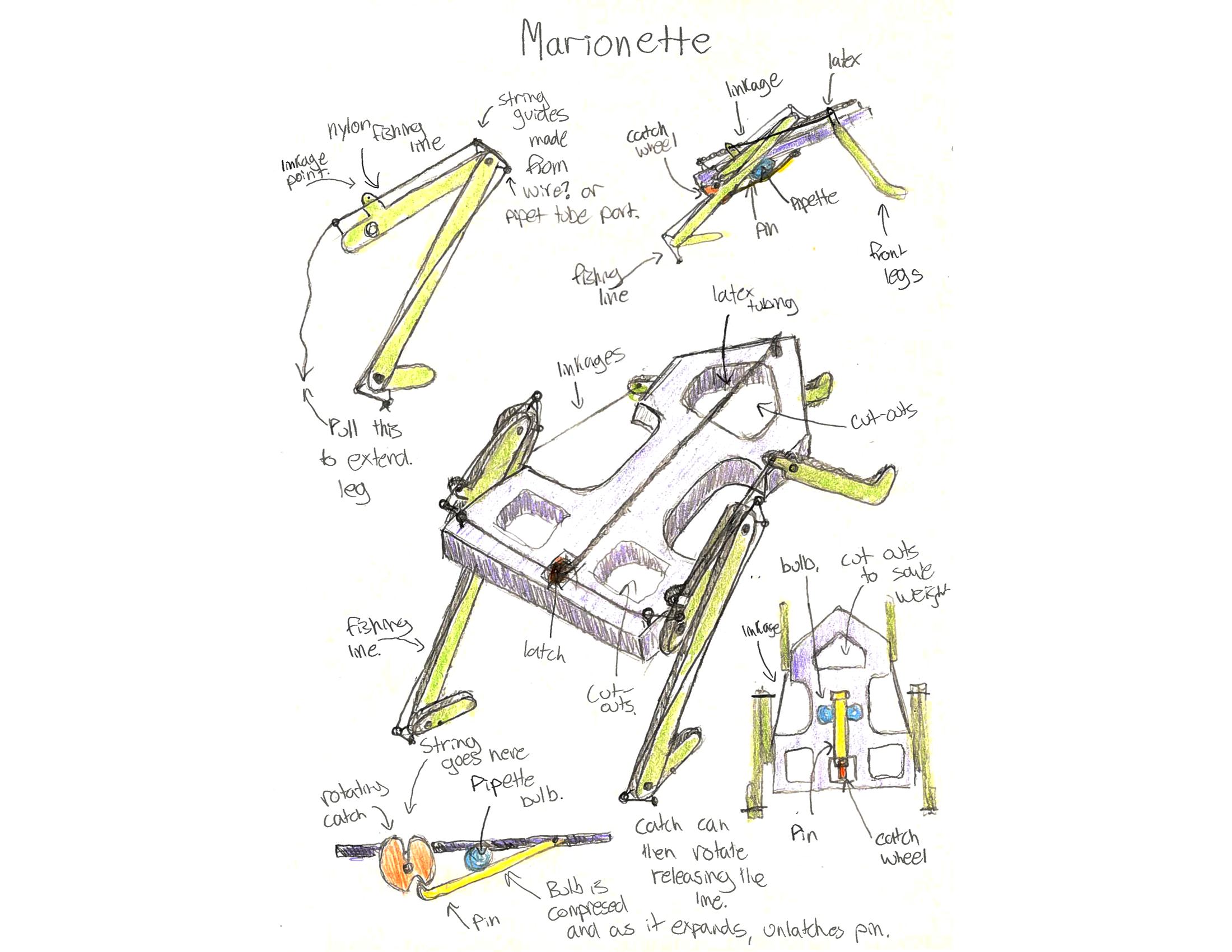
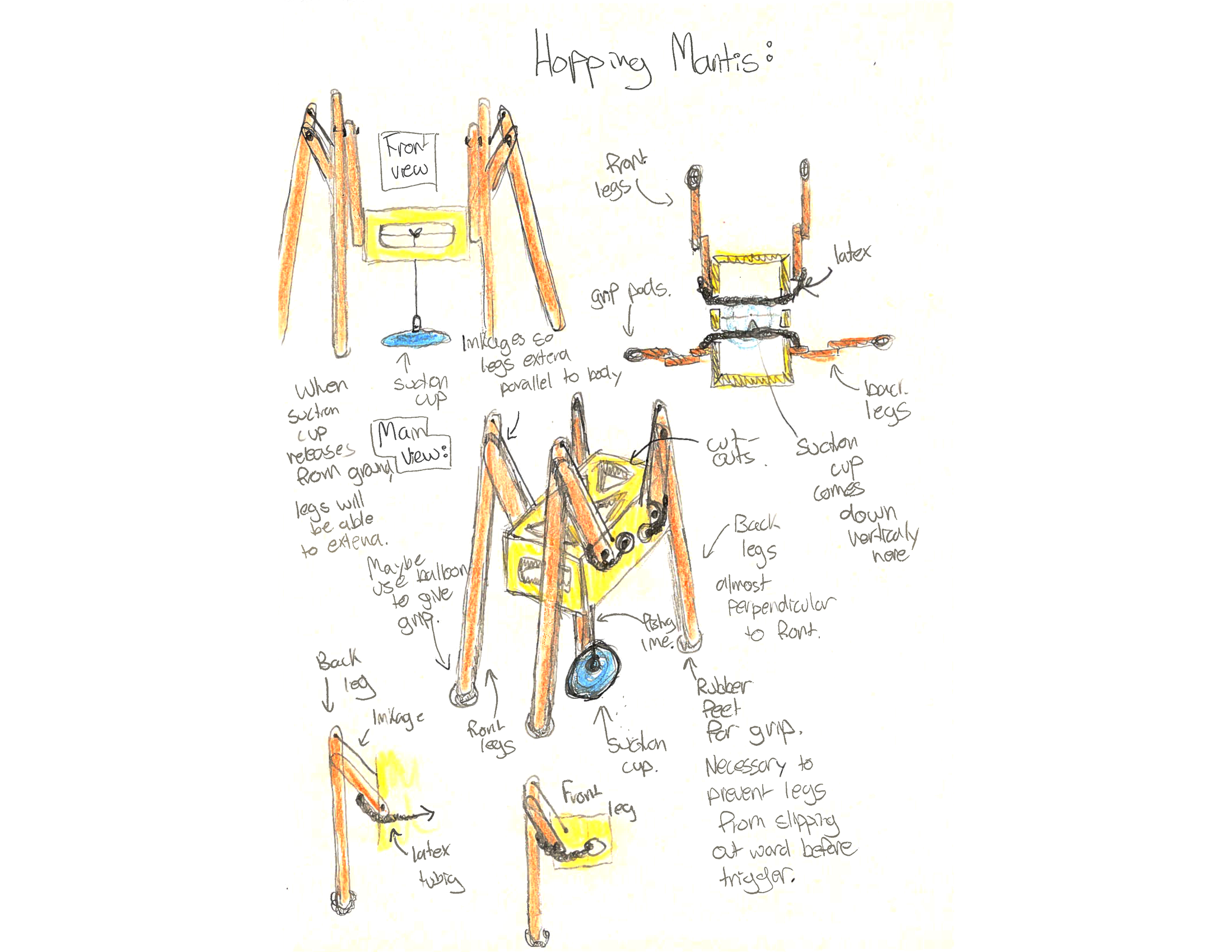
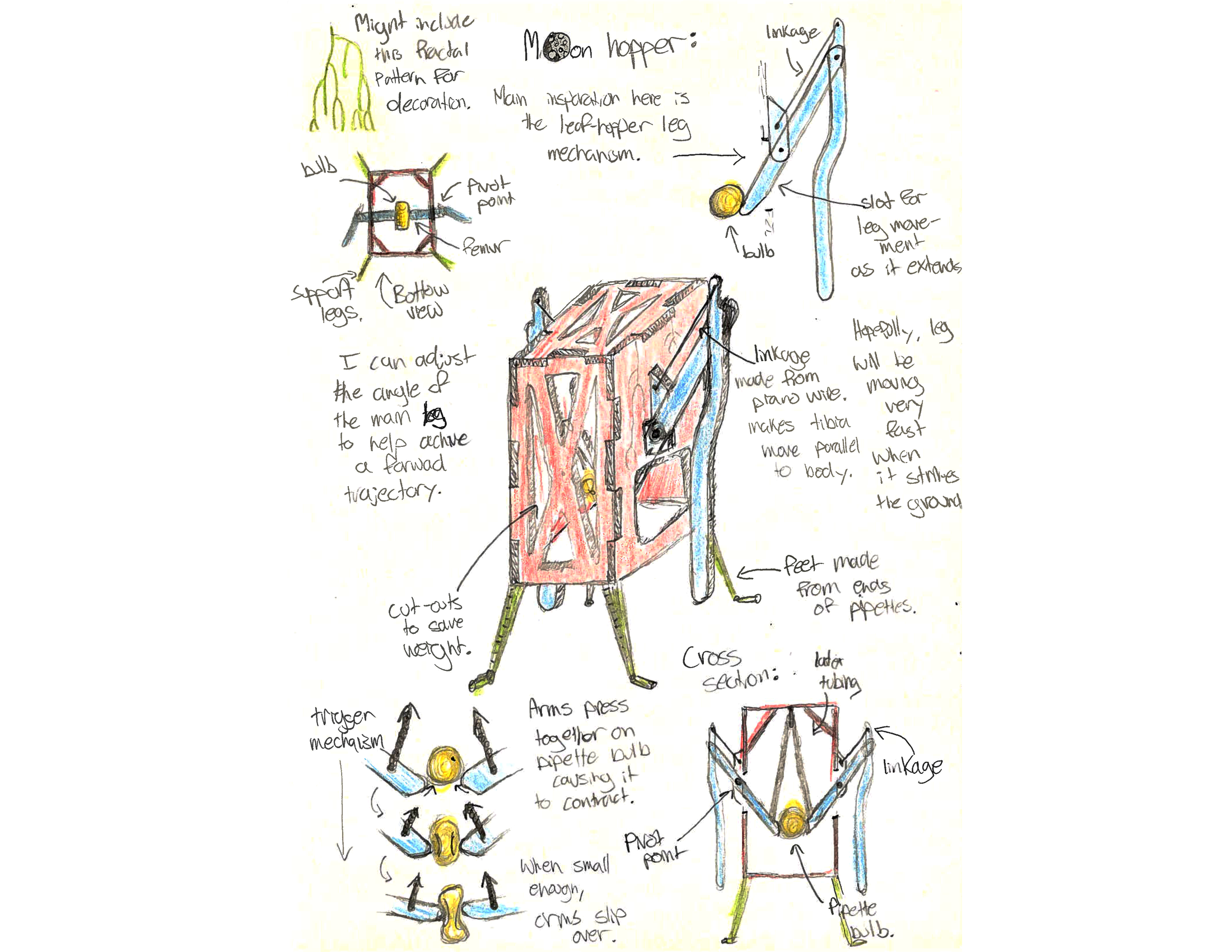
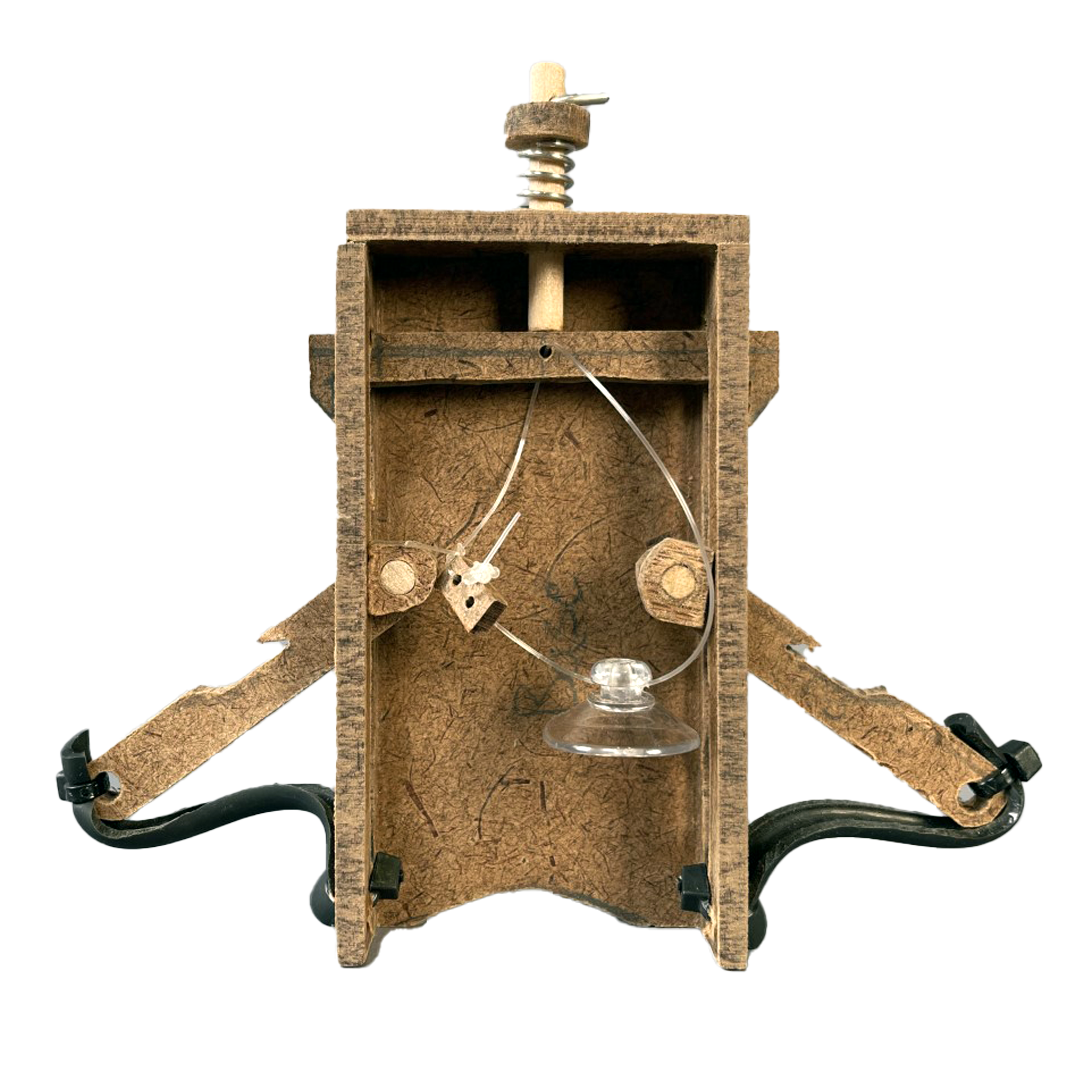
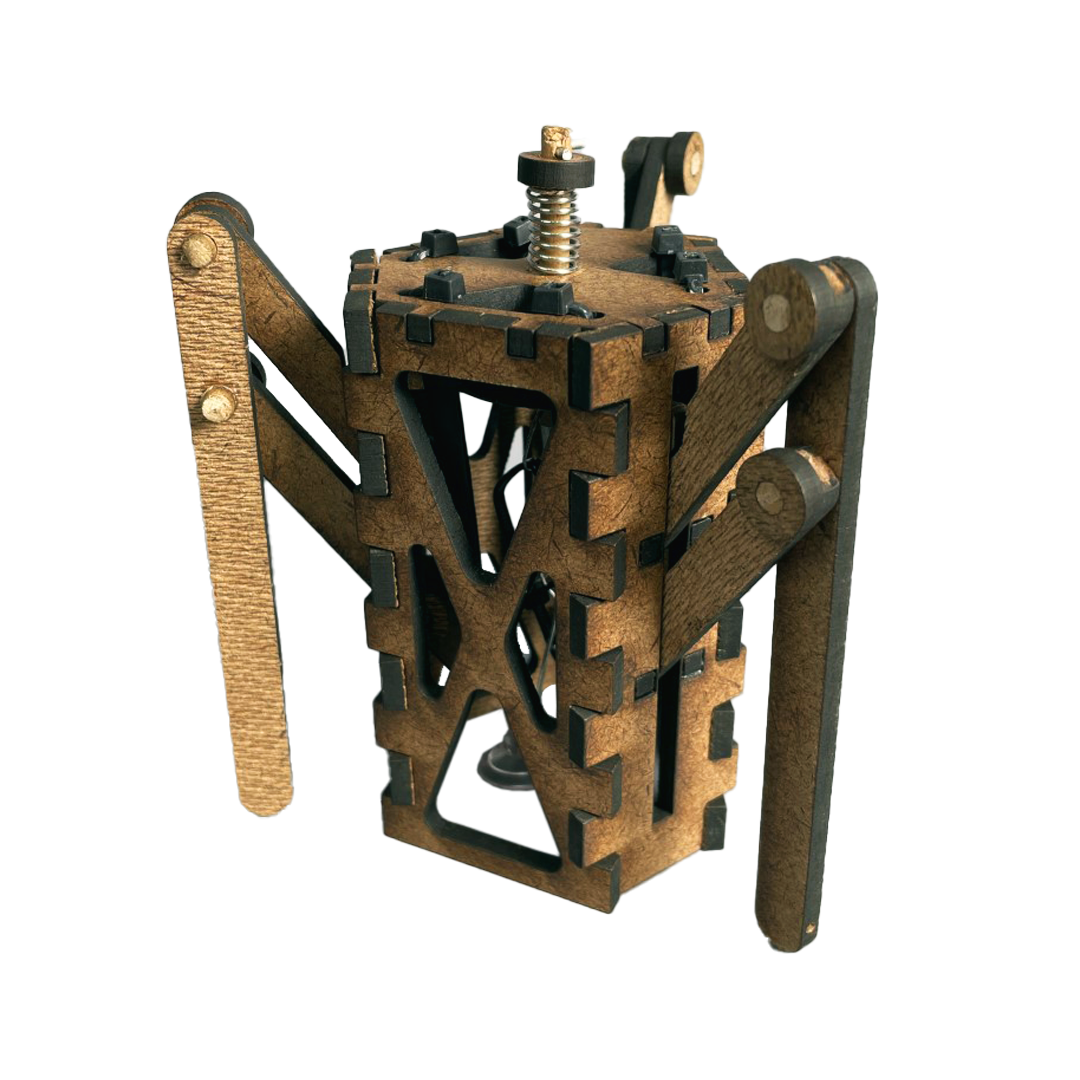
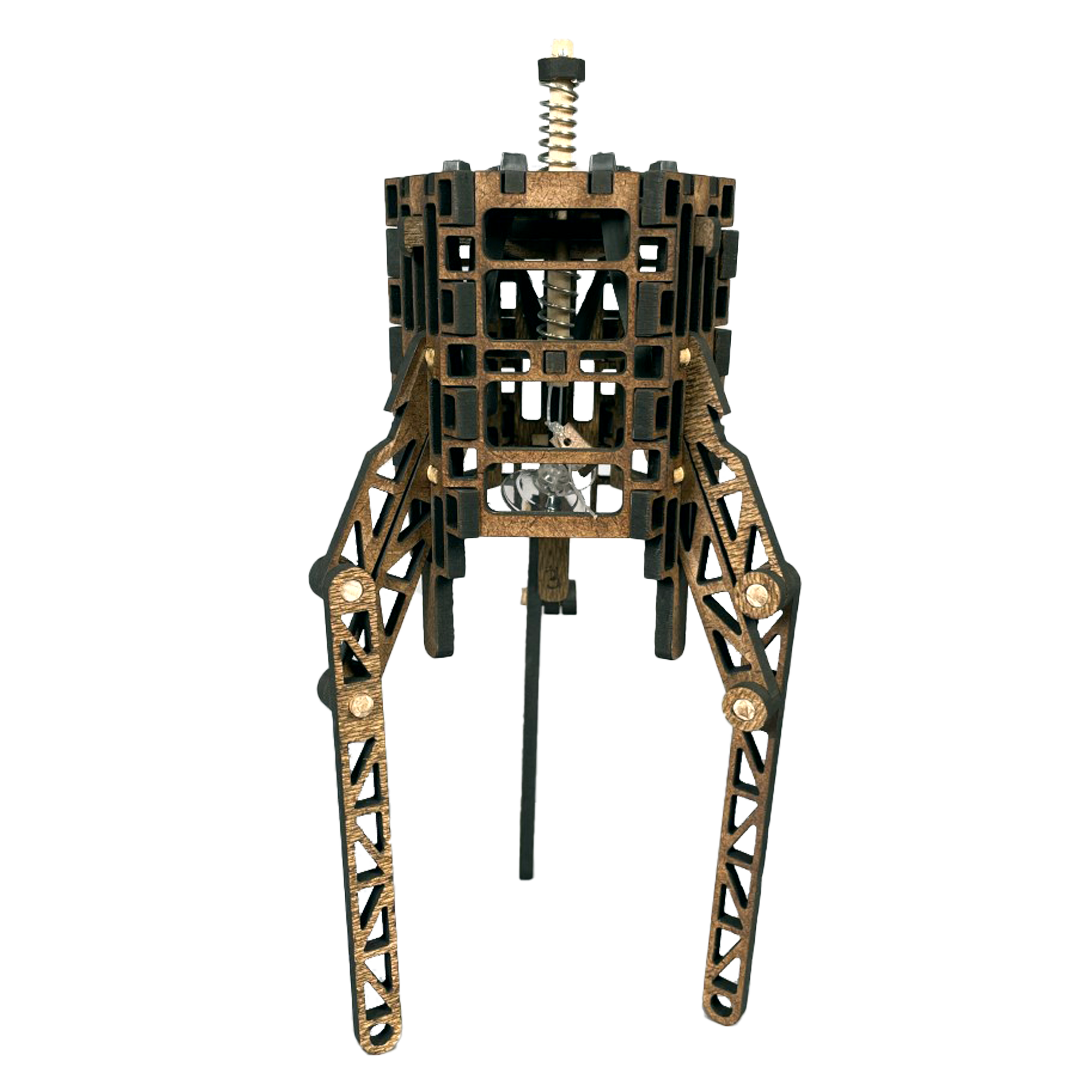
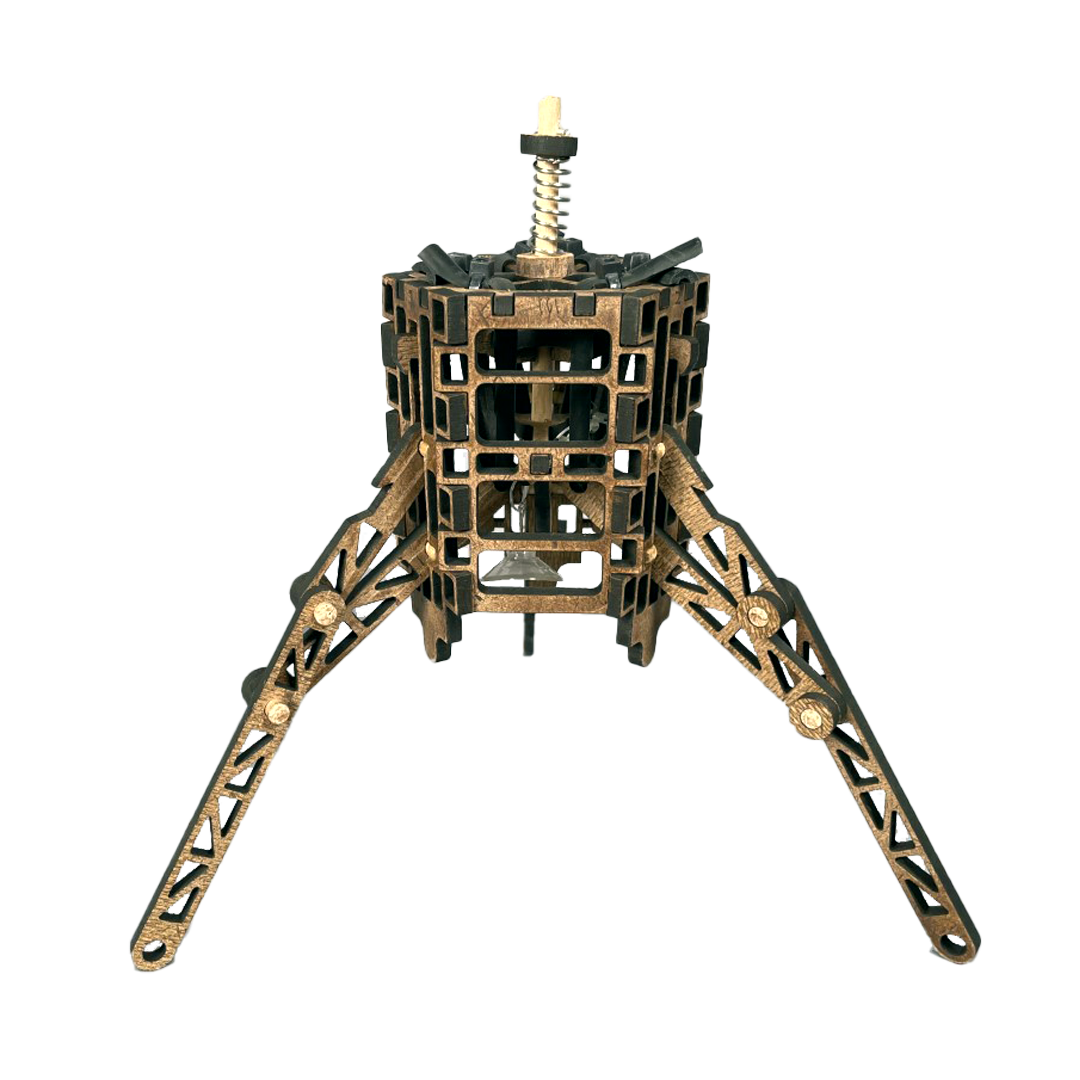
In the first year "hopper project" at Olin College of Engineering, students build a jumping contraption inspired by nature and refined it through rapid prototyping. My design relies on a set of three-bar-linkages to push the hopper off the ground using the potential energy stored in rubber "tendons". A spring-loaded claw and suction cup form the "trigger mechanism", allowing the machine to spontaneously deploy the legs a few seconds after it is loaded. In addition to complying with the project's short list of approved materials, I designed my hopper under the additional constraint of needing to land upright after each jump.
The final prototype met many of my design goals. I am pleased with my unique trigger mechanism which was able to deploy the legs accurately and consistently, leading to a controlled jump and landing.
To achieve my final prototype, I went through multiple designs and iterations. Starting with simple concept sketches for various hopper designs, I moved on to building simple 3D sketch models to validate design choices (such as the trigger mechanism concept). While my first full prototype was already capable of a self-triggered jump, additional iterations targeted improved landing behavior.
A custom dimable LED desk light
A novelty CNC pick & place machine

An aluminum box with an invisable hinge